东京大学开发「生物混合传感器」,通过“可视化”活细胞检测化学品的方位!
机器人通常会配备不同类型的传感器,于是我们见到了许多会听、会说、会看、会简单思考的机器人,那么“会闻”的机器人你见过吗?

虽然一些基于仿生技术的人工「电子鼻」早已问世,但它们仅能区分出“是什么”,而不能检测“从哪来”。
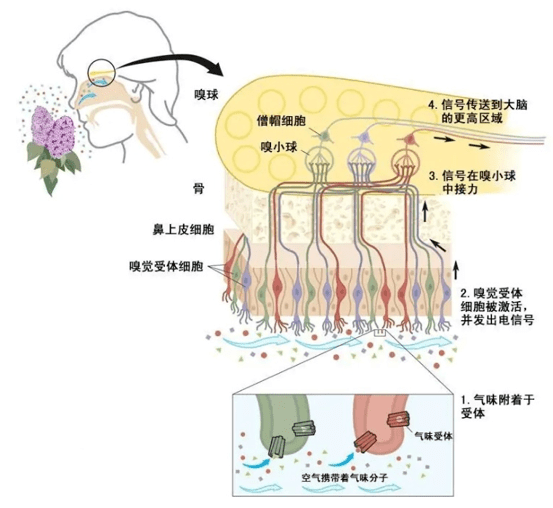
(人类嗅觉原理图)
检测“从哪来”对于环境监测十分有用,例如可由此找到有害化学品的泄漏点。这类技术的突破还将为设计更高效、稳定的机器智能提供重要灵感。
最近,东京大学开发出一种「生物混合传感器」,可以利用活细胞来检测化学品的方位,误差仅在7-13°范围内!
该研究发表在英文科技期刊Cyborg and Bionic Systems (类生命系统)中,该期刊北京理工大学(BIT)和美国科学促进会(AAAS)/ Science共同打造。
▍“可视化”细胞检测化学品来源方位
这已经不是东京大学的研究人员首次将生物混合传感器用于环境检测了,他们还曾利用昆虫的嗅觉感应器实现了气味的识别,能检测出十亿分之几的浓度。这虽然比狗鼻子的灵敏度低了一千倍,但仍是一项令人印象深刻的成就,并激励着团队继续创新。
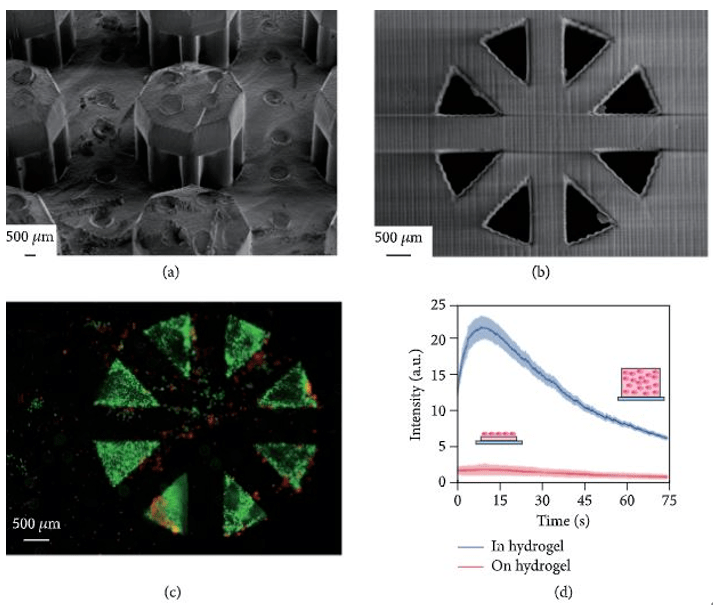
这次,研究人员利用活细胞来检测化学品的存在:他们用一种特殊的物质将细胞染成荧光绿色,当特定化学品分子扩散时,会与细胞结合,增加细胞质中的钙离子浓度,从而使细胞的荧光度增强,以而实现“可视化”。
当细胞像绿莹莹的萤火虫时,就说明有化学品出现了。

那如何检测出化学品的方位呢?
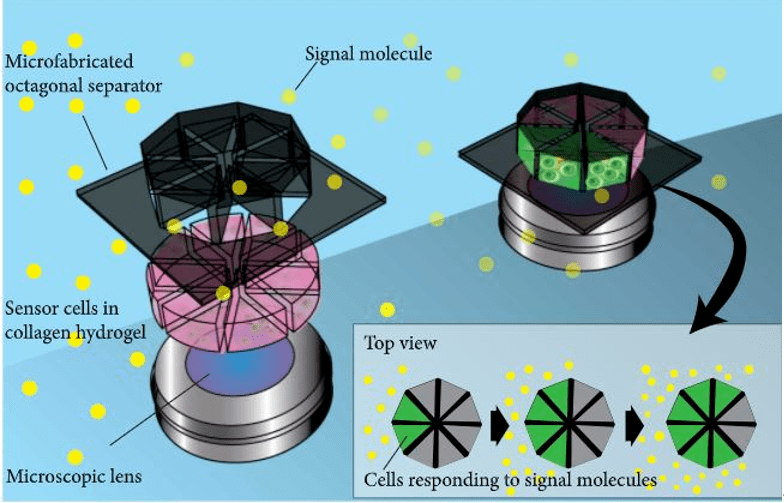
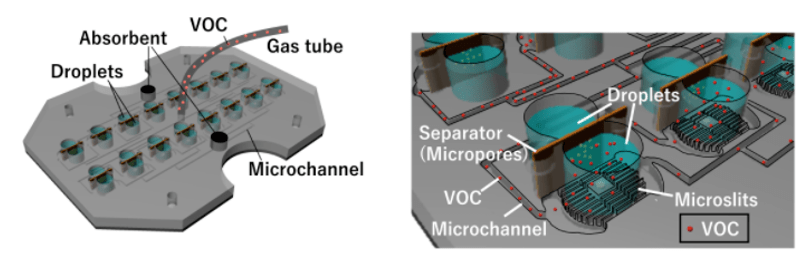
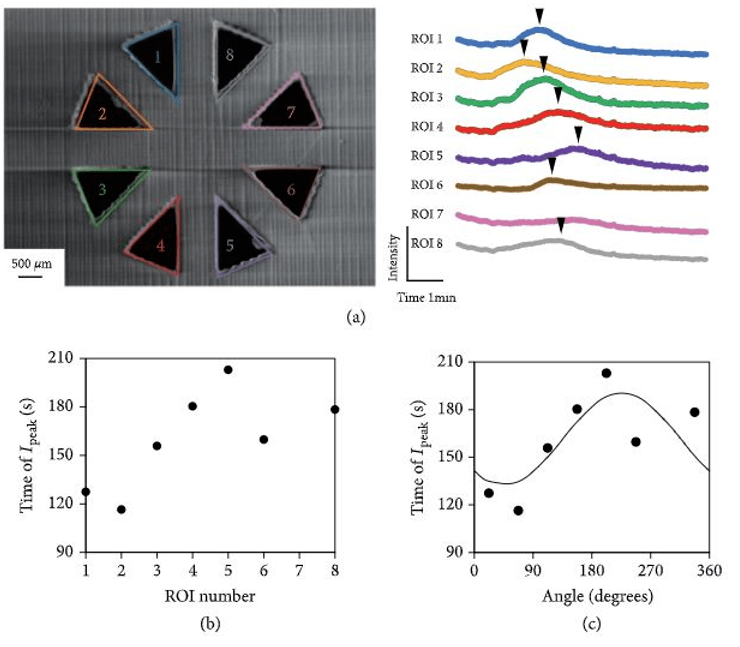
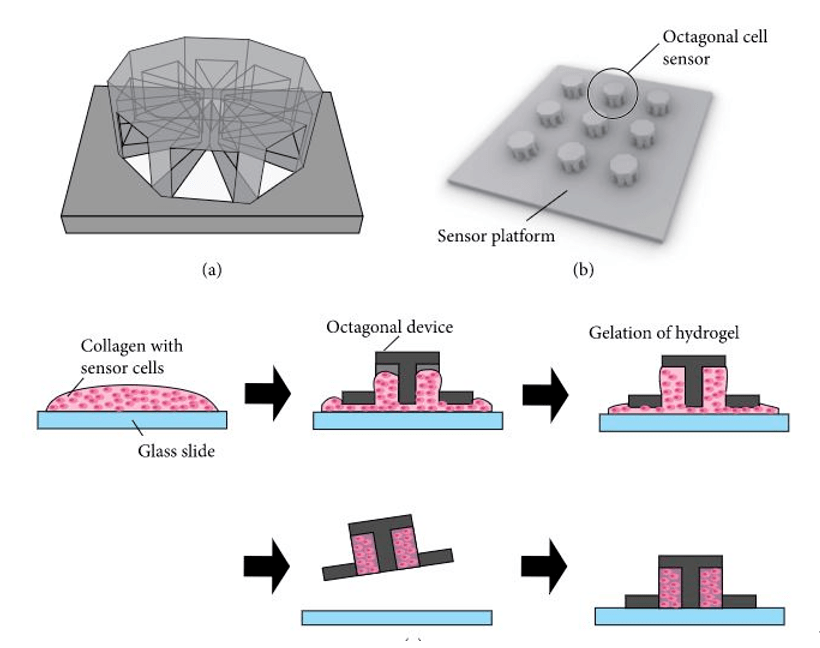
研究人员通过3D打印开发了一种带有8个独立腔室的传感器,可看作8个ROI (Region Of Interest),每个腔室都含有以水凝胶为载体装载的活细胞,以保持细胞活性,研究人员通过分析每个ROI中细胞荧光强度的响应时间,就可以识别出化学源的方位。
具体来说,这8个ROI都对应着不同的方位,研究人员计算了每个ROI中活细胞达到峰值荧光强度的时间,并绘制了荧光强度-时间关系曲线图,将时间拟合值最低,也就是最快达到荧光峰值的ROI的方位看作是化学源的方位。
▍有效、准确、误差小
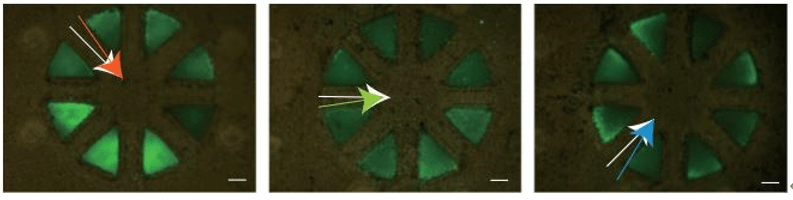
为了测试上述生物混合传感器的有效性,研究人员将化学品沿三个不同的方位扩散:45°、90° 和 135°。通过计算“化学品到达”的时间和每种情况下检测化学源方位的拟合曲线,检测结果分别为34°、97°和 146°。
下图中,白色箭头表示化学源的实际方位,而彩色箭头表示检测的结果,平均误差在7-13° 范围内。
虽然原理听起来简单,但实际操作过程中还是有不少细节需要注意:例如由于该传感器是微型的,仅高1.5mm,这增加了其制造难度;为确保传感器的准确性,在进行实验时,化学品仅能从8个腔室的侧面进入,这就要保证传感器的上部和底部是完全密封、不能泄露的。
▍可用于医学诊断及环境监测
机器人的视觉、听觉、力学感应,均可以通过光学,声学和物理方式来感测和量化,然而嗅觉很难通过人工手段进行量化,气味及化学品等的识别和来源检测更是难上加难。

一般来说,化学源方位的检测有两种方法:一种是使用可移动传感器,操作人员到处走走停停,哪里信号强测哪里,但这种设备在单个位置的估算精度不是很高;
第二种方法是使用多个传感器,根据反应时间的差异来检测化学源的方位。这种方法经常用于检测声音和声纳信号的来源方位,但这需要大量的设备和数据,十分复杂。
东京大学的研究人员结合了生物学和工程学的要素,利用“可视化”的活细胞及与化学品结合的时间差,有效地检测了化学品的存在及其来源方位,这在医学诊断、环境监测等方面十分有帮助。未来研究人员还将在AI算法等方面进行扩展,进一步缩短检测时间、提高检测精度。